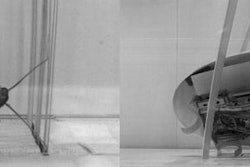
In Autodesk’s Pier 9 workshop, artist-in-residence Madeline Gannon has been developing a software program capable of translating human movements into commands for industrial robots.
So many processes are already automated, that “automation tasks where the human is entirely removed from the equation is reaching a limit of diminishing returns,” says Gammon. That’s why she devised this software to use industrial robots to augment humans’ abilities rather than replace them.
The robots’ users wear special markers that a motion-sensing camera uses to build an image of the users’ movements. The software, known as Quipt, relies on an open-source library — Robo.Op available on github — to match those movements with predetermined responses. For every motion, the robot follows, mirrors or avoids.
For safety, the Quipt software also incorporates a work zone, like an imaginary box around the user, to limit robot response. If the user steps outside the work zone, the robot stops responding.
SO, WHAT DO YOU THINK?
Will this type of software expand the usability of industrial robots? Could Quipt improve safety on the manufacturing floor?
Email us or leave your comments below.