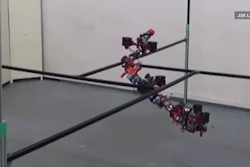
Autodesk’s Brickbot may look like it’s playing with toys, but the project is really intended to reduce the amount of time it takes to teach a robot to put parts together. The project is made of two Universal Robots UR10 robotic arms, with cameras and sensors motivated by a neural learning system, which can identify and pick pieces from a mix of objects.
The San Francisco-based team is led by Mike Haley and Yotto Koga at Autodesk’s AI Labs. In the test, the robot is given a lot of toy bricks and a design for an object. The neural net figures out on its own how to snap the pieces together to follow the design.
The researchers propose that neural learning like this could one day be used to enable construction robots to adapt to new projects and new requirements quickly, perhaps even on the job site, without needing lengthy programming time. For now, it’s been a significant challenge to enable two robot arms to pick up unevenly-shaped bricks, but it got there. This could make industrial robots more flexible and also help them to seamlessly assemble things out of parts placed in front of them.