A University of Washington team of computer scientists and engineers has built a robot hand that can not only perform dexterous manipulation but also learn from its own experience without needing humans to direct it.
Their latest results are detailed in a paper to be presented May 17 at the IEEE International Conference on Robotics and Automation.
 (Image credit: University of Washington)
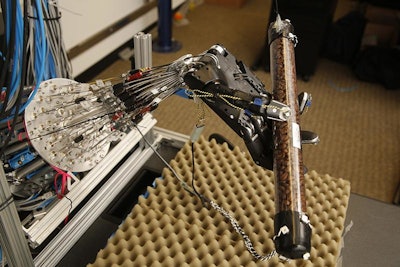
(Image credit: University of Washington)The UW research team spent years custom building one of the most highly capable five-fingered robot hands in the world. Then they developed an accurate simulation model that enables a computer to analyze movements in real time. In their latest demonstration, they apply the model to the hardware and real-world tasks like rotating an elongated object.
 (Image credit: University of Washington)
(Image credit: University of Washington)With each attempt, the robot hand gets progressively more adept at spinning the tube, thanks to machine learning algorithms that help it model both the basic physics involved and plan which actions it should take to achieve the desired result. (This demonstration begins at 1:47 in the video below.)
This autonomous learning approach developed by the UW Movement Control Laboratory contrasts with robotics demonstrations that require people to program each individual movement of the robot’s hand in order to complete a single task.
The research team from the UW Movement Control Laboratory includes (left to right) Emo Todorov, associate professor of computer science and engineering and of applied mathematics; Vikash Kumar, doctoral student in computer science and engineering; and Sergey Levine, assistant professor of computer science and engineering.
 (Image credit: University of Washington)
(Image credit: University of Washington)UW computer science and engineering doctoral student Vikash Kumar custom built this robot hand, which has 40 tendons, 24 joints and more than 130 sensors.
So far, the team has demonstrated local learning with the hardware system — which means the hand can continue to improve at a discrete task that involves manipulating the same object in roughly the same way. Next steps include beginning to demonstrate global learning — which means the hand could figure out how to manipulate an unfamiliar object or a new scenario it hasn’t encountered before.